w15 <<
Previous Next >> w17
w16
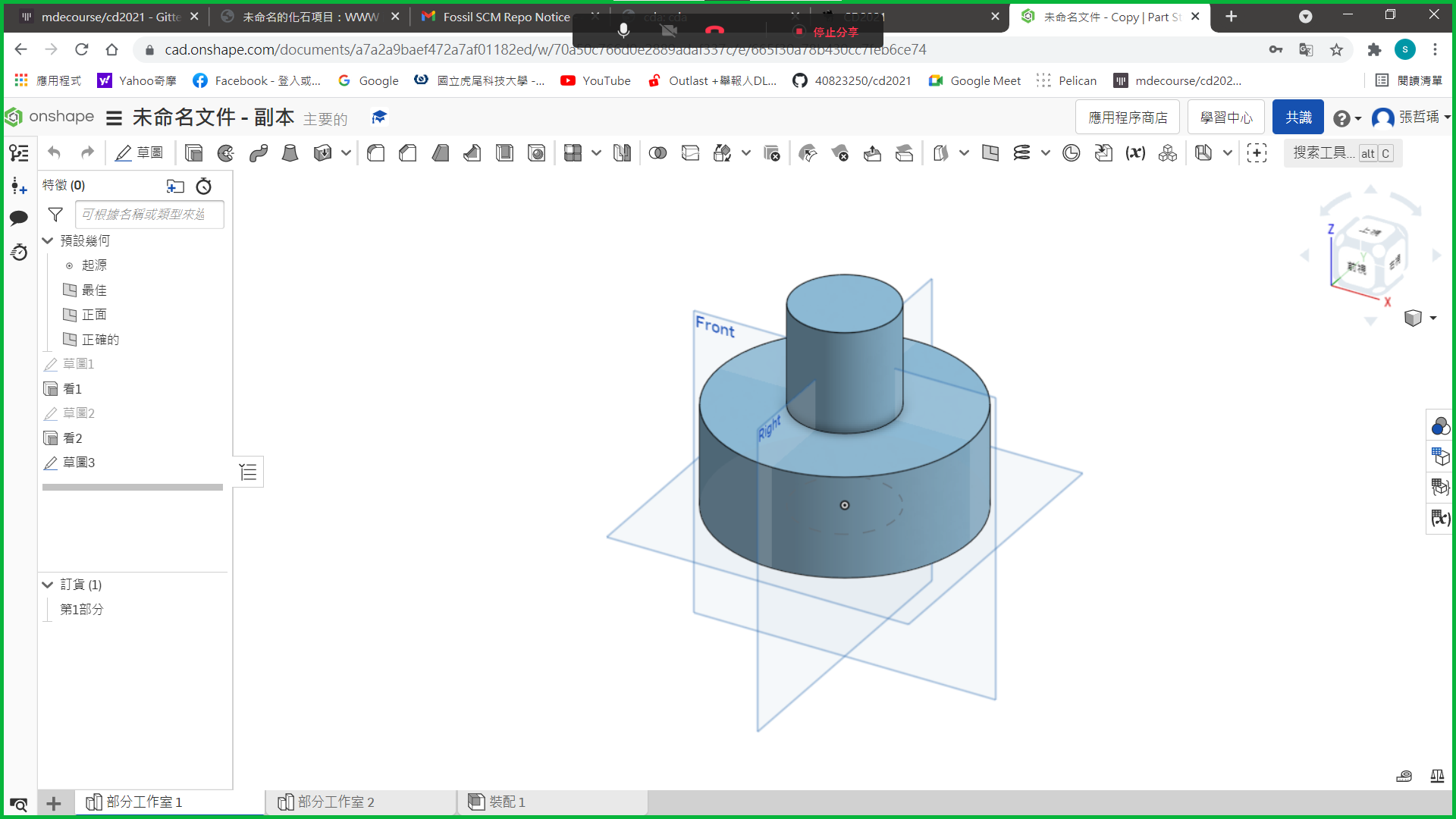
onshape 零組件繪製
第一次零件圖
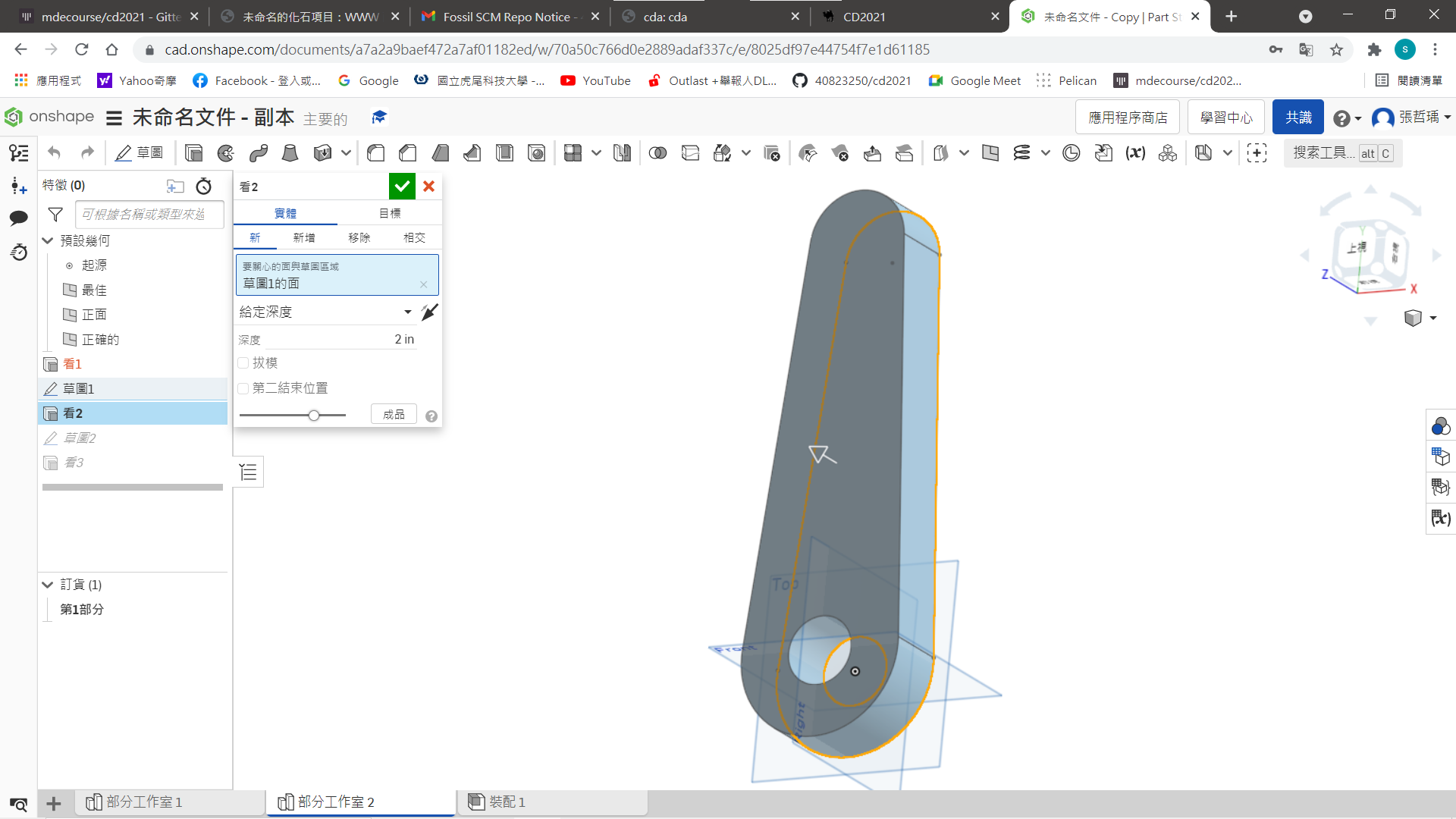
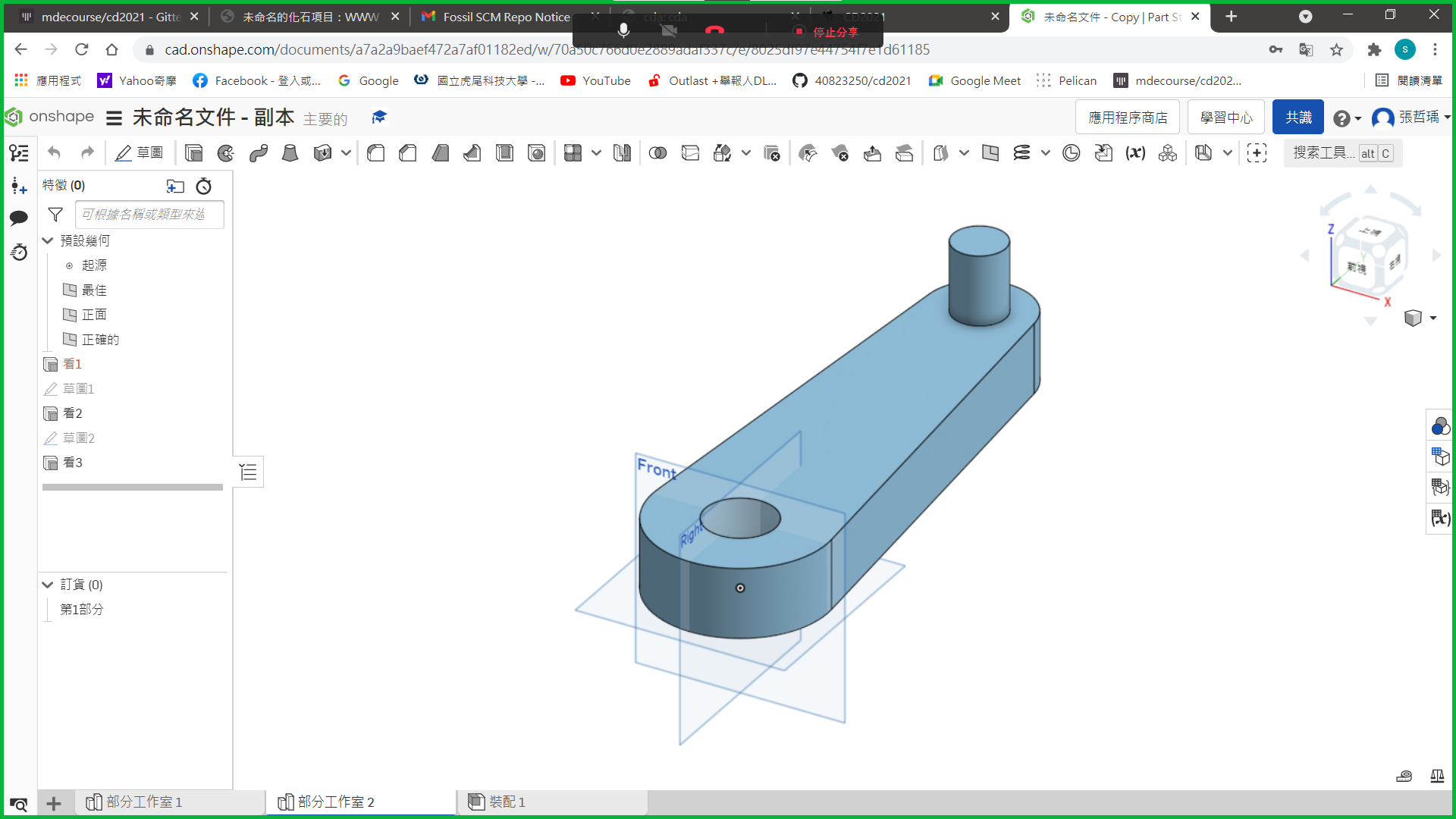
第二次改良(整體組合圖) 改良原因在第一次繪製圖檔尺寸太小,所以第二次的尺寸做加大
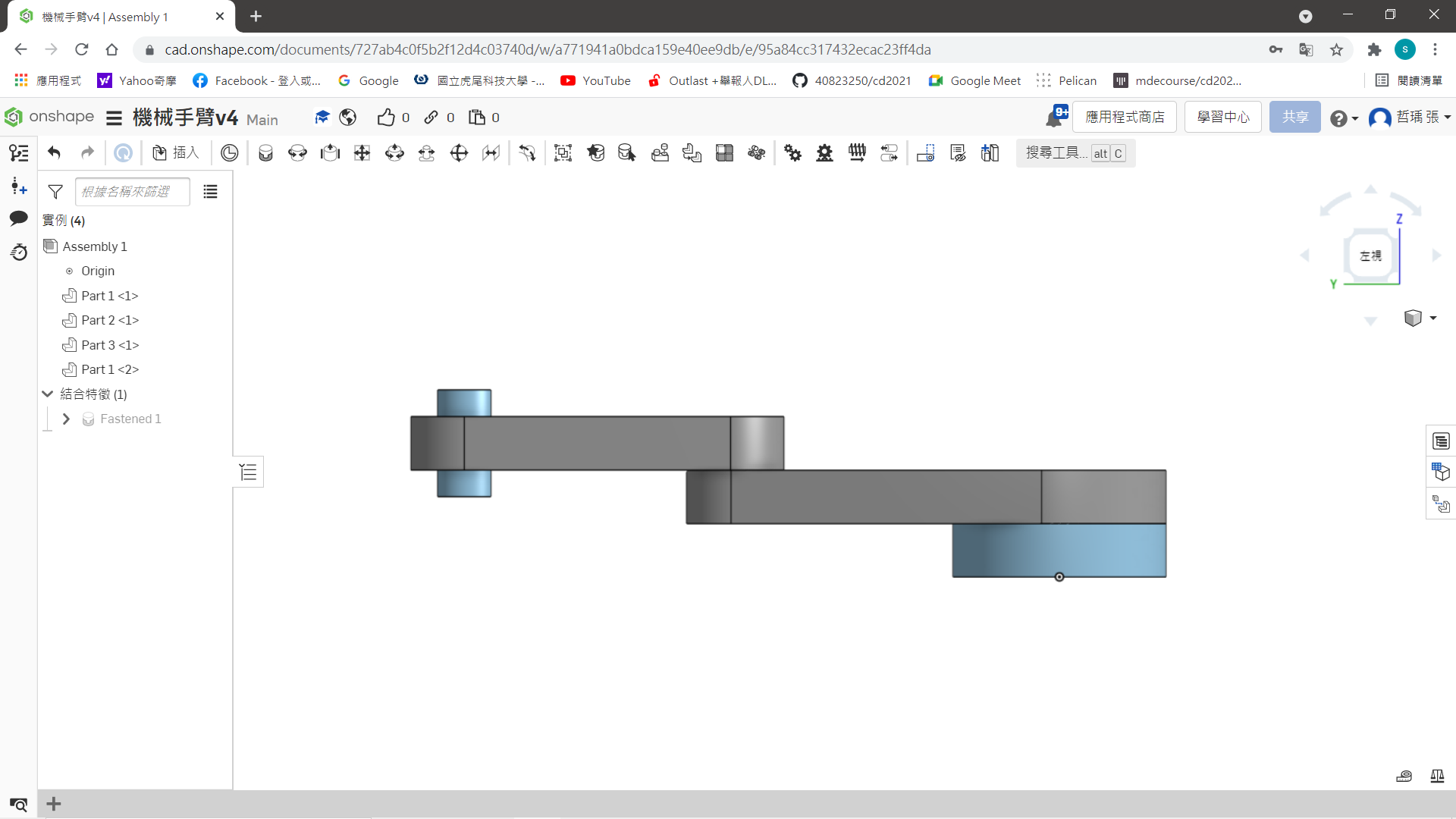
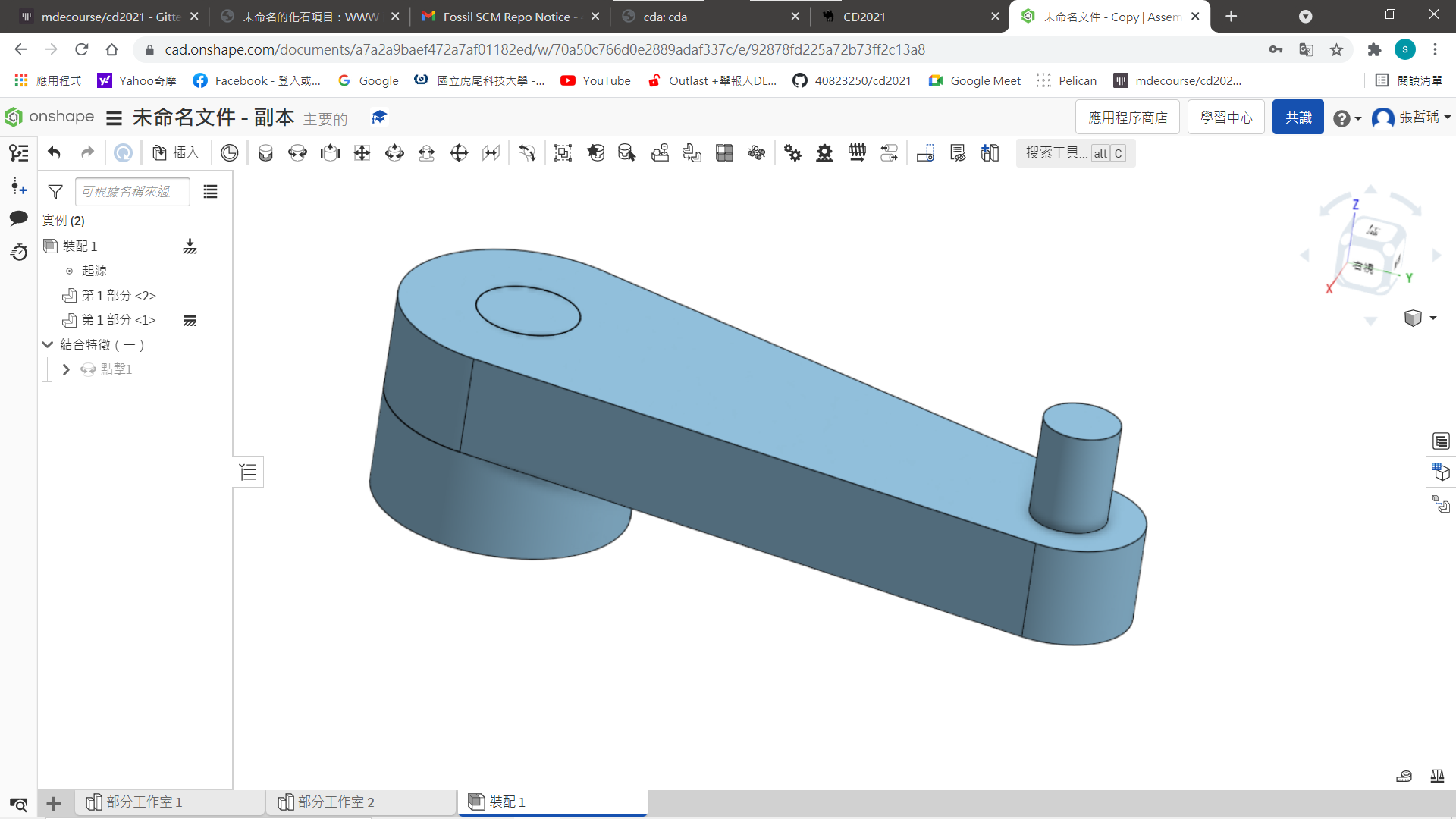
onshape 零件組圖檔
建立 CoppeliaSim 4.1.0 MTB robot 場景
1.google drive 雲端 2.CoppeliaSim
操作手臂控制影片
手臂末端加入 components-gripper-suction pad 吸盤
逆向運動學函式
Python remote API 逆向運動學函式
心得總結
在Onshape、Coppeliasim兩個軟體裡算是學會比較久,那麼也經過很多同學的教導,慢慢地熟練到能夠自己打開程式無須通學在旁指導我每個步驟,這個測驗雖然還有些美中不足的地方,但主要是學習到對程式的了解以及熟練度和不恥下問。
另外也必須謝謝班上的林厚宇同學40823214,大多數的同學也一起努力在遠距上共同解決問題和發問,讓大家都能夠了解問題所在之處。
w15 <<
Previous Next >> w17